



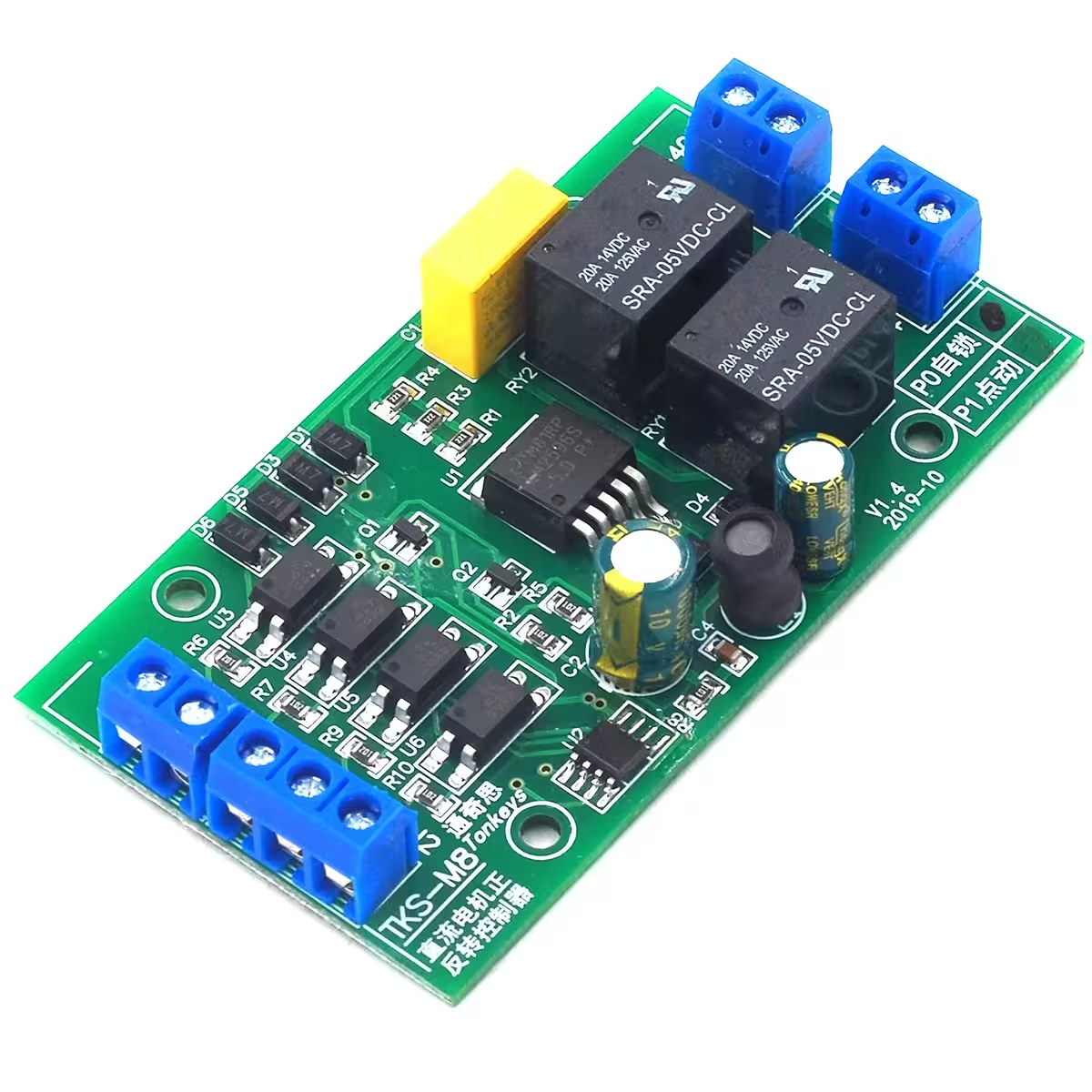
DC motor controller voor vooruit/achteruit aansturing – geen externe componenten nodig
Werk je aan een lineaire actuator, een omkeerbaar mechanisme of een ander DIY-project waarbij je de draairichting van een motor nauwkeurig wilt regelen? Zonder de juiste module ben je vaak aangewezen op complexe schakelingen met relais, transistors en een wirwar aan bedrading. Deze DC motor controller biedt de oplossing in één compacte module: sluit de voeding, de motor en de knoppen aan, en je bent binnen enkele minuten operationeel.
Let op: De motor ontvangt dezelfde spanning als de voedingsbron. De uitgangsspanning is niet regelbaar via deze controller.
Waarom kiezen voor deze controller? (Belangrijkste voordelen):
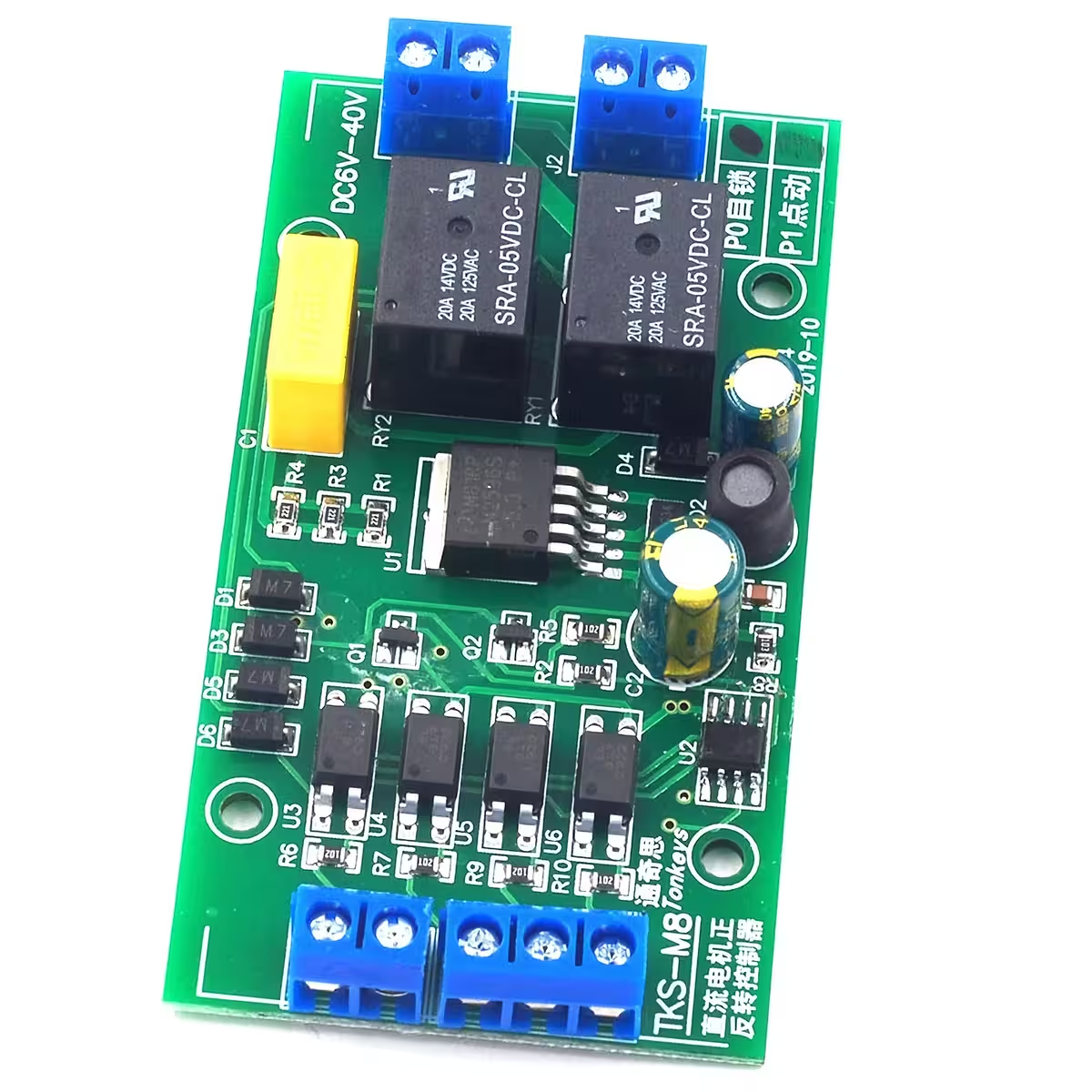
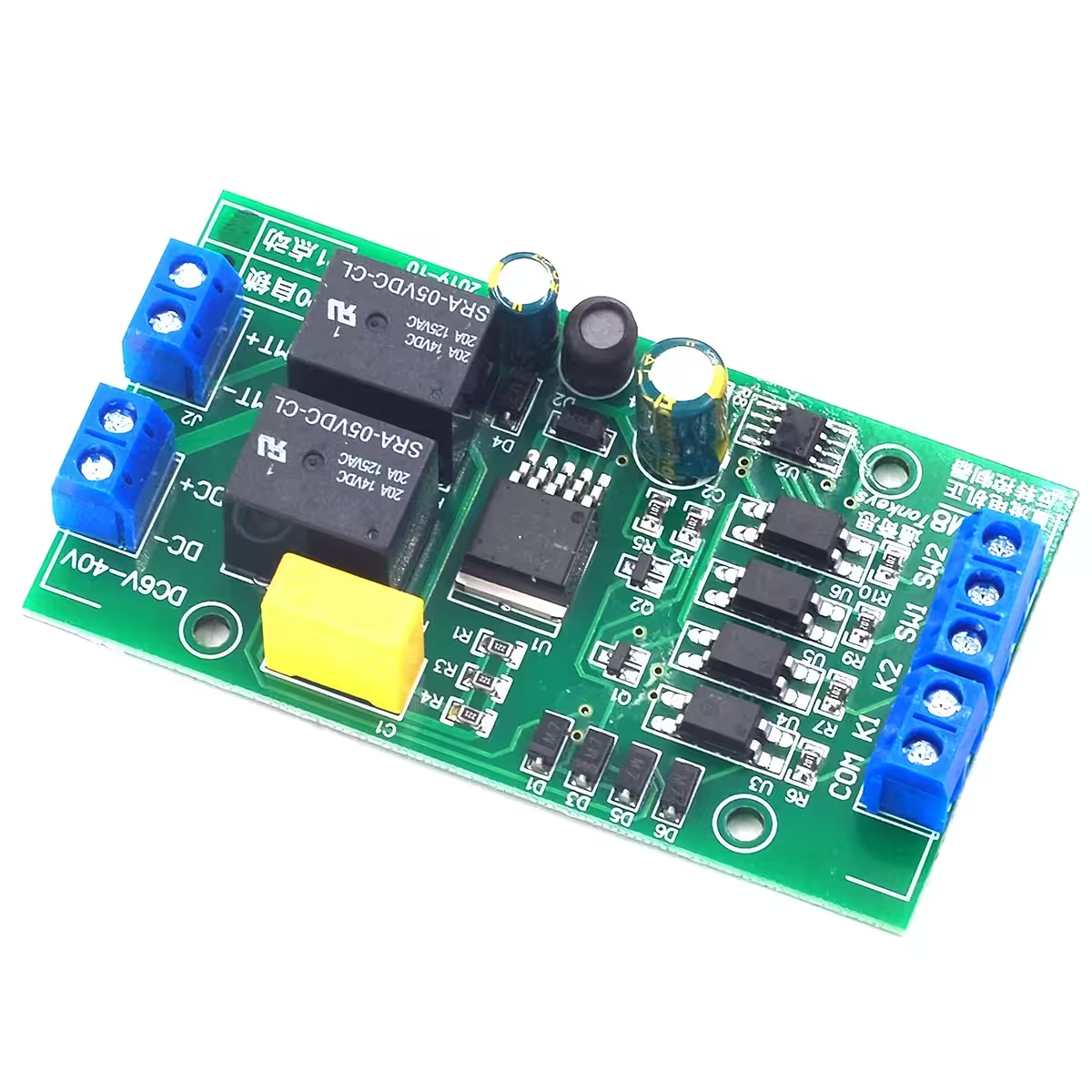
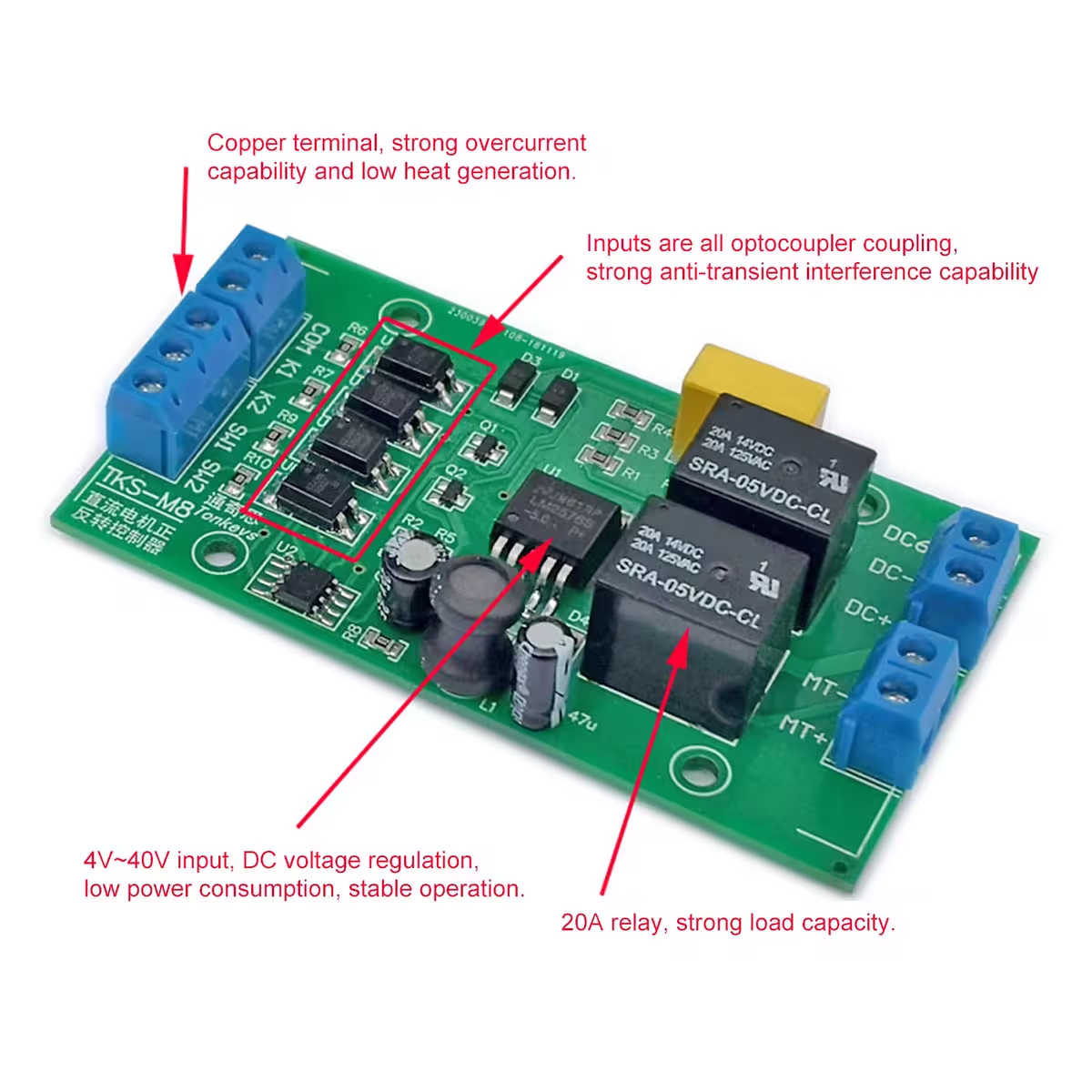
- Breed spanningsbereik: 4–40V DC — geschikt voor LiPo-accu’s, laboratoriumvoedingen of industriële adapters zonder aanpassingen.
- Uitgangsstroom tot 20A — moeiteloze aansturing van motoren met hoge aanloopstromen, geschikt voor vermogens tot ca. 80W.
- Twee selecteerbare modi: PO en P1 — kies tussen zelfhoudend (starten met een korte puls) of jog-modus (draaien zolang de knop wordt ingedrukt).
- Universele active-low ingangen — sluit direct eenvoudige drukknoppen, NO-eindschakelaars of 3-draads NPN-sensoren aan zonder extra weerstanden of logica.
- Geïntegreerde eindschakelaars SW1/SW2 — automatische stop aan het einde van de slag, wat mechanische blokkades of overbelasting voorkomt.
- Lange levensduur >150.000 schakelingen — betrouwbaar voor dagelijks, intensief gebruik.
- Laag eigen verbruik: 0,6W actief / 0,1W standby — ontziet je accu wanneer het systeem in ruststand staat.
Details en Prestaties
De controller maakt gebruik van een active-low ingangsarchitectuur: een ingang wordt geactiveerd zodra de spanning onder de 2V zakt. Hierdoor kun je standaard drukknoppen, NO (normally-open) eindschakelaars en NPN-NO 3-draads sensoren direct aansluiten zonder tussenkomst van extra componenten.
De responstijd bedraagt ≈20ms voor K1/K2-commando’s en ≈50ms voor de SW1/SW2-eindschakelaars — snel genoeg voor dynamische toepassingen, maar stabiel genoeg om valse triggers te voorkomen.
Bij hogere voltages is het raadzaam de stroom te beperken: bij 12V kun je tot 20A belasten, terwijl bij 24V een limiet van ca. 10A wordt aanbevolen voor een veilige thermische werking op lange termijn. Gebruik altijd een geschikte zekering en bekabeling die past bij de belasting.
| Parameter | Waarde / Detail |
|---|---|
| Werkspanning | DC 4–40V (aanbevolen 6–36V) |
| Maximale uitgangsstroom | tot 20A (bij 12V) |
| Aanbevolen motorvermogen | tot ca. 80W |
| Eigen verbruik (actief) | ca. 0,6W |
| Eigen verbruik (standby) | ca. 0,1W |
| Ingangssignaal type | Active-low (geactiveerd bij spanning < 2V) |
| Responstijd K1/K2 | ≈ 20ms |
| Responstijd SW1/SW2 | ≈ 50ms |
| Bedrijfsmodi | PO (zelfhoudend) / P1 (jog) |
| Levensduur | >150.000 schakelingen |
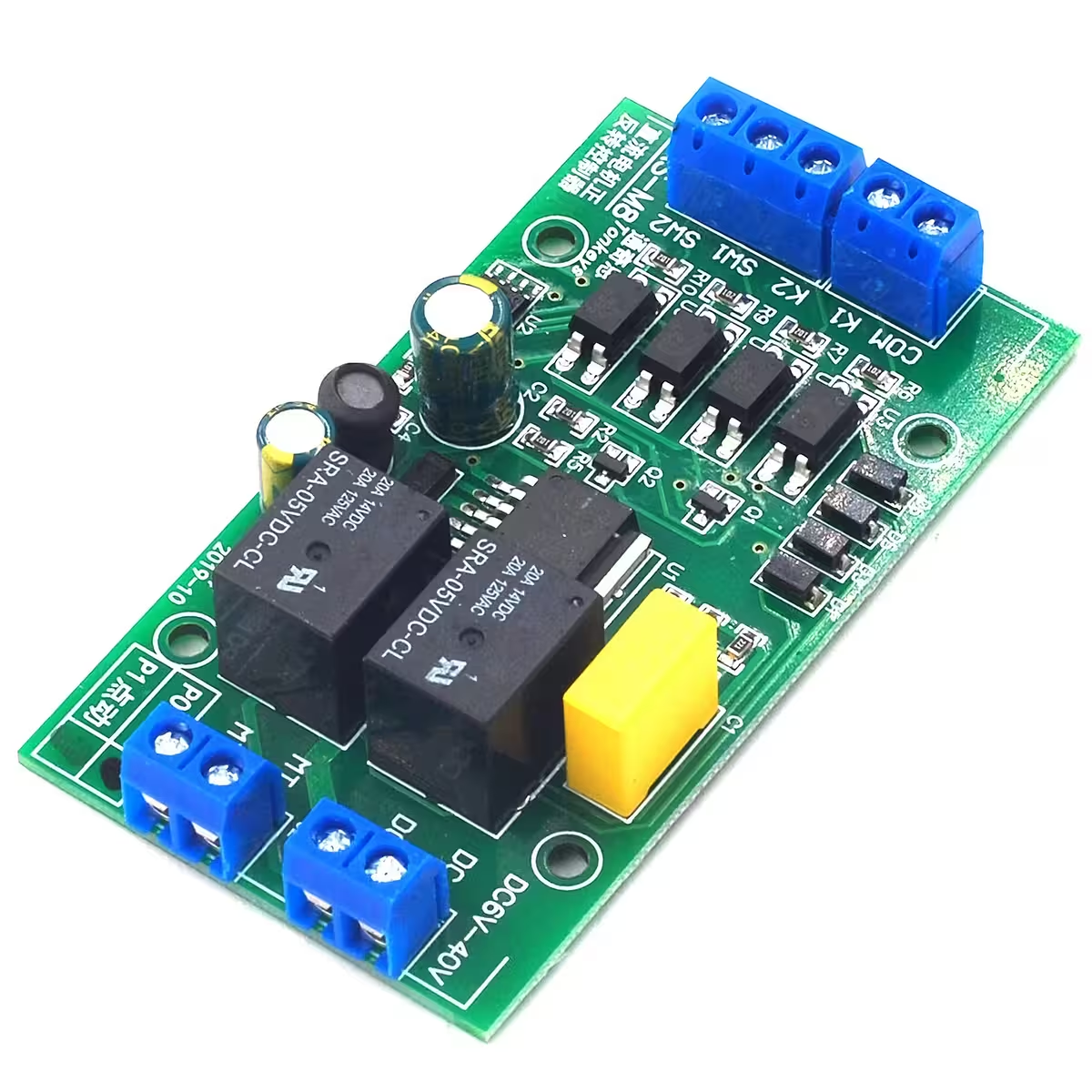
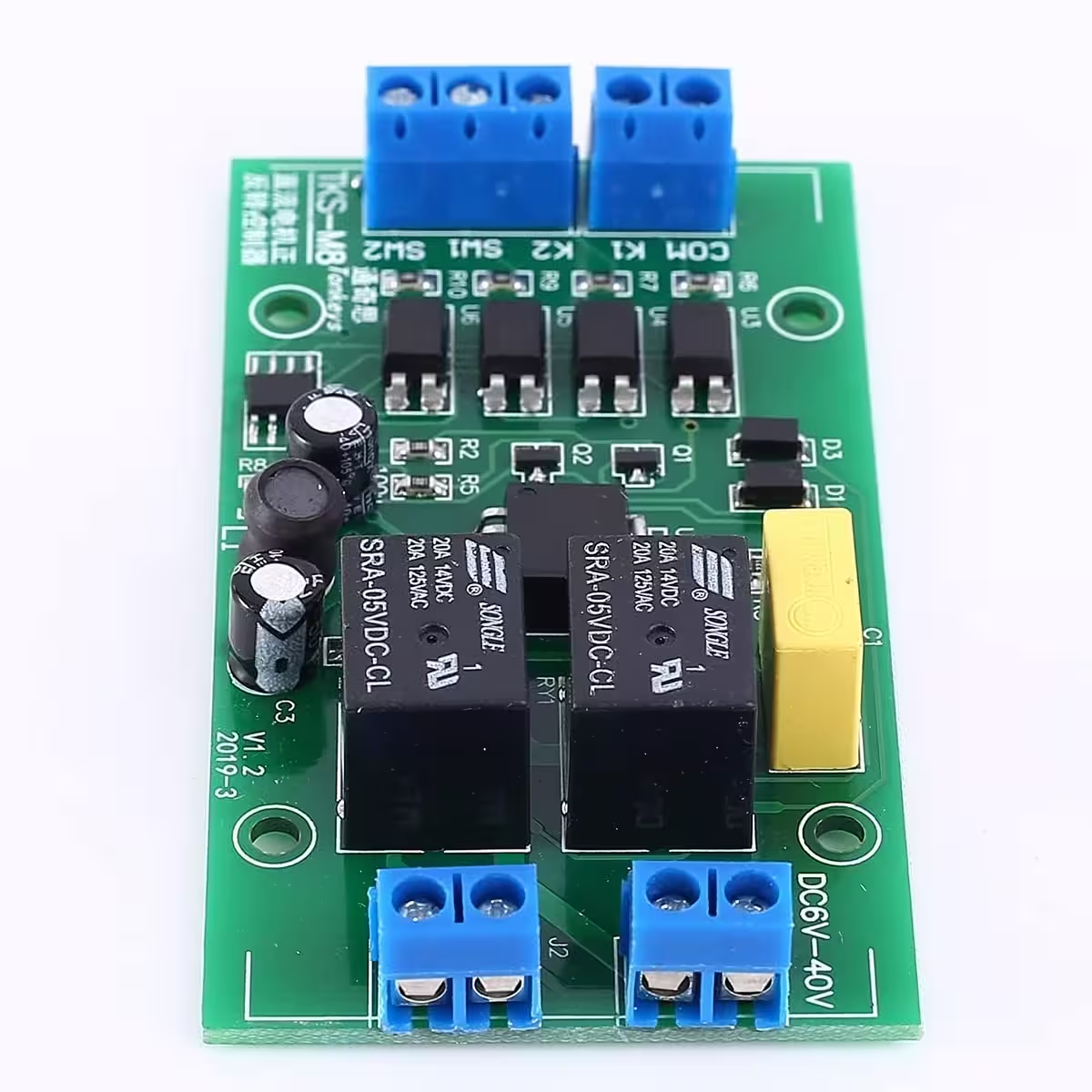
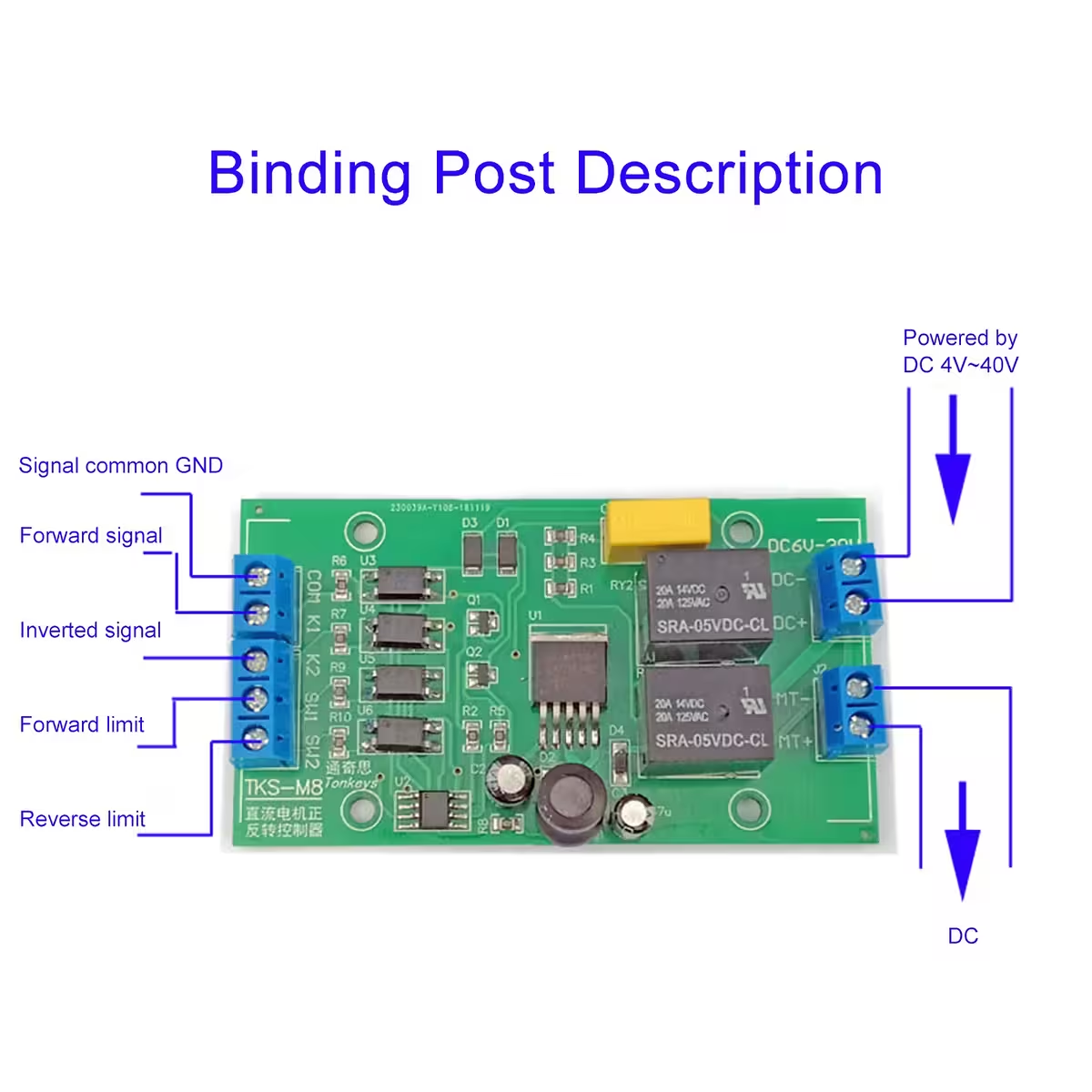
| Ingang K1 | Commando vooruit (active-low) |
| Ingang K2 | Commando achteruit (active-low) |
| SW1 | Eindschakelaar vooruit (NO aanbevolen) |
| SW2 | Eindschakelaar achteruit (NO aanbevolen) |
| VIN+ / VIN- | Voeding module DC 4–40V |
| Motor+ / Motor- | Uitgang naar DC-motor |
Programmering en Gebruik
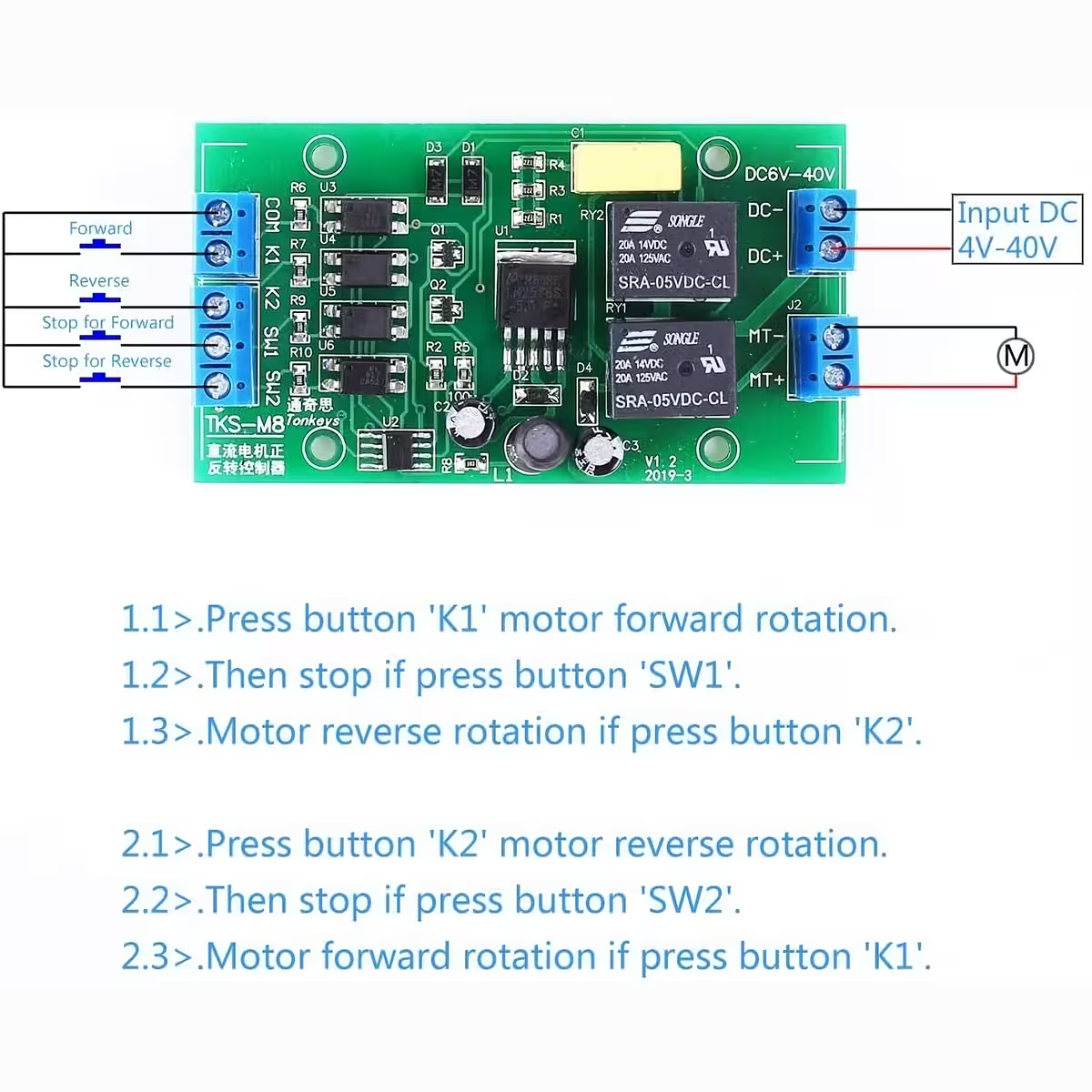
Modus PO (Zelfhoudend): Een korte puls op K1 of K2 start de motor. Deze blijft draaien totdat de bijbehorende eindschakelaar wordt geactiveerd of het tegenovergestelde commando wordt gegeven. Ideaal voor automatisering.
Modus P1 (Jog): De motor draait alleen zolang het K1 of K2 commando actief blijft. Ideaal voor fijnafstelling en handmatige positionering.
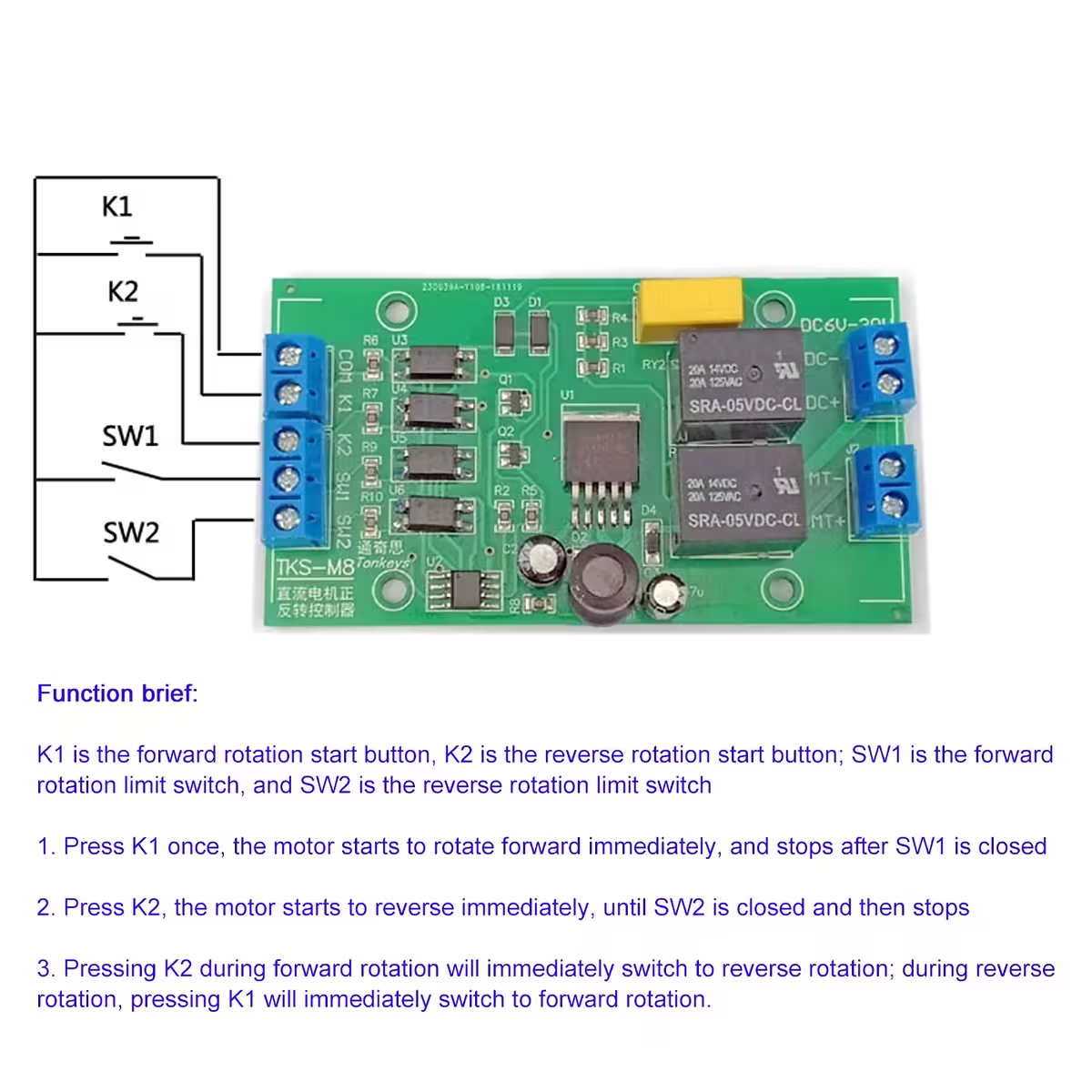
- Sluit de voeding aan op VIN+ en VIN– (let op de polariteit).
- Sluit de DC-motor aan op Motor+ en Motor–.
- Selecteer de gewenste modus: PO voor zelfhoudend of P1 voor jog.
- Sluit drukknoppen of stuursignalen aan op K1 (vooruit) en K2 (achteruit) — gebruik active-low ingangen.
- Sluit optioneel mechanische eindschakelaars of NPN-NO sensoren aan op SW1 en SW2.
- Voor automatische cyclische beweging A→B→A: verbind de NO-schakelaars van positie A met K1 en positie B met K2, en laat SW1/SW2 onverbonden.
- Voor Arduino-integratie: verbind de GND van de Arduino met de GND van de controller. Gebruik digitale pinnen voor K1 en K2. Stel de pinnen in als OUTPUT en stuur een LOW-signaal om te activeren.
- Controleer de aanloopstroom van de motor en plaats een passende zekering in de voedingslijn.
Inhoud van de verpakking
- 1 × DC motor controller (Forward / Reverse), PO/P1 modi
Veelgestelde vragen
Wat betekent active-low en waarom is dit belangrijk?
De ingang wordt geactiveerd wanneer de spanning onder de 2V zakt — oftewel wanneer deze met de massa (GND) wordt verbonden. Eenvoudige drukknoppen, NO-eindschakelaars en NPN-sensoren werken precies zo. Je hebt geen extra weerstanden of inverterende logica nodig.
Wat is het verschil tussen modus PO en P1?
In PO-modus start een korte puls de motor, die vervolgens autonoom blijft draaien tot een eindschakelaar of stopcommando volgt. In P1-modus draait de motor alleen zolang je de knop ingedrukt houdt, wat handig is voor nauwkeurige handmatige besturing.
Kan ik deze controller direct aansturen met een Arduino?
Ja, dat kan. Verbind de GND van de Arduino met de GND van de controller en gebruik twee digitale pinnen (ingesteld als OUTPUT). Wanneer de pin LOW wordt, is het commando actief. De Arduino regelt de logica, de controller het vermogen — zonder extra componenten.
Kan ik NC (normally-closed) eindschakelaars gebruiken?
De controller is geoptimaliseerd voor NO (normally-open) schakelaars. NC-contacten draaien de logica om, wat kan leiden tot ongewenst gedrag. Gebruik daarom altijd NO-contacten voor SW1 en SW2.
Is een koellichaam nodig bij maximale stroom?
Bij stromen richting de 20A of bij intensieve cycli is goede ventilatie aanbevolen. Voor continu gebruik onder zware belasting kan een klein koellichaam of geforceerde koeling de levensduur aanzienlijk verlengen.
Hoe creëer ik een automatische heen-en-weer beweging zonder timer?
Verbind de NO-schakelaars van positie A met K1 en positie B met K2, en laat SW1/SW2 onverbonden. Zodra de motor een eindpunt bereikt, activeert de schakelaar automatisch de tegengestelde richting, waardoor de motor blijft pendelen zonder externe tussenkomst.
Video
Galerij












Beoordelingen
Er zijn nog geen beoordelingen.